Undersea Communication Networking
The process of undersea observation, mapping, and monitoring is experiencing a dramatic paradigm shift away from platform-centric, human-controlled sensing, processing and interpretation. Rather, distributed sensing using networks of autonomous platforms is becoming the preferred technique. An optimal platform suite is often highly heterogeneous with large differences in mobility, maneuverability, sensing capability, and communication connectivity. The sensor systems have different constraints on platform mobility and communication capacity, and some network operations require highly coordinated maneuvering of heterogeneous platforms. Nested Autonomy is a new command and control paradigm, inherently suited for such heterogeneous networks. Implemented using MOOS-IvP , Nested Autonomy provides the fully integrated sensing, modeling and control that allows each platform, on its own or in collaboration with partners of opportunity, to autonomously detect, classify, localize and track (DCLT) an episodic, natural or human-created event, and subsequently report back to the operators.
A robust undersea communication infrastructure is crucial to the operation of such networks. In contrast to air and land-based equivalents, the extremely limited bandwidth, latency and intermittency of underwater acoustic communication imposes severe requirements to the selectivity of message handling. Thus, contact and track reports for high-priority event, such as a detected chemical plume from a deep ocean vent, which may indicate an imminent volcanic eruption, must be transmitted to the system operators without delay. On the other hand, reports concerning less important events and platform status reports may be delayed without significant effects. Previous message handling systems for underwater communications have only a rigid, hard-coded queuing infrastructure, and do not support such advanced priority-based selectivity, hampering the type and amount of information that can be passed between cooperating nodes in the network. This severely limits the level of autonomy that can be supported on the network nodes.

Collaborative autonomy demonstrated in SWAMSI09 using MIT LAMSS communication stack. The two BF21 AUVs Unicorn and Macrura perform synchronized swimming maintaining a constant bistatic angle of 60 degrees relative to a proud cylindrical target (cp).
In response to this problem, a new communication software stack has been developed at MIT-LAMSS under the Goby GPL project, in support of autonomous sensing programs such as the ONR ASAP MURI, GOATS, and SWAMSI. This new stack has enabled the operation of a communication infrastructure which provides robust message handling for collaborative autonomous sensing by heterogeneous, undersea autonomous assets, as demonstrated in a handful of major recent field experiments. As an example, the figure above shows the collaborative, multistatic MCM mission by the Unicorn and Macrura BF21 AUVs during SWAMSI09 in Panama City, FL. The two vehicles are circling a proud cylinder (cp) at a distance of 80 m maintaining a constant bistatic angle of 60 degrees. The collaboration was achieved fully autonomously without any intervention by the operators, with each vehicle adapting its speed based on its current position and the position of the other vehicle extrapolated from the latest status, contact or track report. Such collaborative maneuvers would not be possible using traditional communication schemes, where navigation packets must be rigidly interleaved with messages containing data and command and control sequences. In contrast, the Dynamic Compact Control Language (DCCL) used by the LAMSS communication stack allows for adequate navigation information to be packed with all other required message content.
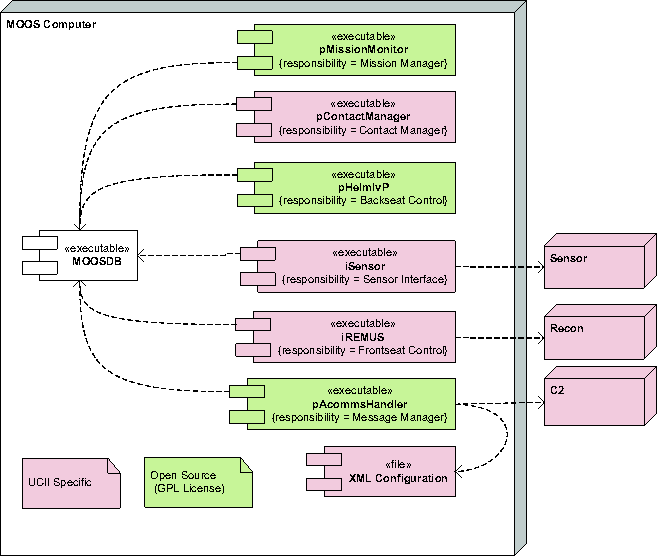
Being based on established libraries of message handling software, the open source architecture of this new MOOS communication stack lends itself directly to a wide range of military and civilian applications. It supports an arbitrary message suite and content without requirement of modifying software. All message encoding and decoding information is specified in a mission-unique configuration file written in the standard XML format. Not only does this ensure maximal flexibility in regard to message design, but it inherently enables arbitrary levels of encryption for LPI/LPD communication networks.